

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
旋转导向随钻成像测井系统在苏里格气田地质导向中的应用
[王树慧①, ②  , 刘永明
, 刘永明③ , 高阳④ , 谢文敏⑤ , 陈楠④ , 费世祥①, ② , 范箐⑥ , 石磊⑦ ]
, 刘永明|
|


作者简介:王树慧 工程师,1986年生,2012年毕业于西安石油大学矿产普查与勘探专业,现在中国石油长庆油田公司勘探开发研究院主要从事天然气综合地质研究、水平井开发等工作。通信地址: 710018 陕西省西安市未央区长庆兴隆园小区。电话:(029)86978950。E-mail:wshhui1_cq@petrochina.com.cn
苏里格气田苏东南致密气水平井示范区井控程度低,有效砂体认识不明确,在地质导向过程中识别难度大,且常规定向仪器零长较大,井斜调整速度缓慢,人为干扰因素较多,导致钻遇率偏低,无法满足更高精度的钻井地质导向要求。为此,引进了中油测井公司的旋转导向随钻成像测井系统,该系统具有两项突出优势:一是数据采集点距离钻头近,测量盲区较常规地质导向随钻测井系统缩短15%,确保了钻井地质导向的实时性;二是依靠推靠肋板控制井眼轨迹,造斜能力较强,可达5°/10 m。该系统在苏东南致密气水平井示范区JX-H 2井应用,试验结果为:水平段有效储集层最终钻遇率达到72.96%,较采用常规地质导向系统提高了10%,且水平段机械钻速提高了0.81 m/h。这表明,该旋转导向随钻成像测井系统可实现水平井精确地质导向,并可提高机械钻速,缩短钻井周期,为后续水平井的高质高效开发奠定了强有力的基础。
, LIU YongmingThe demonstration area of Sudongnan tight gas horizontal wells in Sulige Gasfield is characterized by low well control degree, unclear recognition of effective sand body, great difficulty in identification of geosteering process, the large zero length of conventional directional instruments, slow adjustment of well deviation and many human interference factors, resulting in low drilling ratio, which can not meet the requirements of high precision drilling geosteering. For this reason, the rotary steering imaging LWD system of China Petroleum Logging Co., Ltd. (CNLC)is introduced. The system has two outstanding advantages: one is that the data acquisition point is close to the bit, and the measurement blind area is shortened by 15% compared with the conventional geosteering LWD system, which ensures the real-time performance of drilling geosteering; the other is to control the well trajectory by pushing against the ribbed plate, the built-up rate is high, up to 5°/10 m. The application test of this system in JX-H 2 well of Sudongnan tight gas horizontal well demonstration zone shows that the final drilling rate of effective reservoirs in the horizontal section reaches 72.96%, which is 10% higher than the conventional geosteering system, and the penetration rate in the horizontal section increases by 0.81 m/h. The rotary steering imaging LWD system can realize precise geosteering of horizontal wells, improve penetration rate, shorten drilling cycle, and lay a strong foundation for high-quality and efficient development of subsequent horizontal wells.
随钻测井技术是在复杂地质背景下发展起来的前沿测井技术, 随钻测井可以指导地质导向、实时评价储集层特性, 有利于提高储集层钻遇率、缩短完井周期、降低水平井测井风险, 已经广泛应用于大斜度井、水平井的勘探与开发中。
苏里格气田是中国陆上的一个特大型气田。主力产气层为下二叠统山西组山1段至中二叠统下石盒子组盒8段, 是一个低压、低渗透、低丰度, 以河流-三角洲相砂体为主体储集层的大面积分布的岩性气藏。储集层整体致密, 横向非均质性强, 纵向多期叠置, 覆压条件下渗透率小于0.1 mD的样品比例达到92%, 为典型的致密砂岩气藏。
苏里格气田苏东南致密气水平井示范区已钻井数量少, 井控程度低, 开发难度大, 对区域地层构造缺乏微观上的认识, 而地层的局部微幅构造往往与区域构造存在一定的差异性, 在地质导向过程中难以精准识别, 造成实际钻遇与认识不一致的情况; 同时, 在该区域地质导向中应用的传统随钻测井仪器, 因测量盲区较大、井斜调整缓慢等不足, 常导致地质导向误差大, 严重影响了水平井的实施效果, 甚至导致回填侧钻、钻井失败等严重后果, 造成巨大的经济损失。
针对研究区水平井地质导向过程中存在的上述问题, 引进了中油测井公司的旋转导向随钻成像测井系统, 并有针对性地在部分施工难度高的井中进行了试验性应用, 已取得较好的应用效果。
受仪器设备自身的技术限制, 传统随钻测井仪器还具有以下无法克服的缺点, 对钻井地质导向工作造成极大影响。
钻头距测量仪器(伽马、井斜)测点的距离被称为仪器零长, 仪器零长的大小会因井底钻具结构的不同而发生变化。由于传统的钻具组合本身的固有特点, 仪器零长普遍在10 m以上, 部分甚至超过15 m, 测量盲区较大, 无法及时探知钻头位置的地层特征, 致使导向人员获取的地层信息滞后, 常常错过最佳的调整时机, 造成过多无效进尺。在以往的钻井过程中, 已经有很多井眼因为仪器零长过大, 无法取得钻头处实时地层数据而导致水平段钻到储集层的上部或下部(触顶或触底)[1, 2, 3]。
传统定向仪器依靠单弯螺杆进行造斜, 并引导钻头钻进。由于受螺杆自身弯曲度的限制, 此方法造斜能力十分有限, 一般定向钻进时间较长, 复合钻进难以准确控制井斜, 且钻头位置的井斜基本为估算数据, 存在较多的人为影响因素, 有时与实际偏差较大, 井斜调整速度常常无法及时跟上地层的变化趋势。
由于每次开始定向钻进时必须重新摆放工具作业面, 以此来控制井斜和方位的增减, 并通过滑动钻进来完成造斜趋势, 随后才能进行复合钻进, 机械钻速较低, 尤其在泥岩段中调整井眼轨迹时钻速极为缓慢, 从而影响施工进度, 最终延长了钻井周期。
为了解决常规地质导向技术存在的诸多问题, 提高水平井的开发效果, 丰富随钻导向技术分析手段, 在苏东南致密气水平井示范区首次引进了中油测井公司的旋转导向随钻成像测井系统, 并在JX-H 2井水平段钻井过程中开展了应用试验, 成功地解决了上述难题, 取得了良好的应用效果[3]。旋转导向随钻成像测井系统具有如下优点。
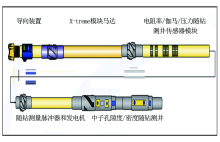
相较于常规随钻成像测井系统, 中油测井公司的旋转导向随钻成像测井系统最大的优点就是测量仪器前置, 数据采集点距离钻头近, 测量盲区缩短15%, 能更快反映岩性变化, 使得近钻头处的井眼情况和地层信息能够迅速地被测量仪器捕捉到, 并及时反馈给现场导向人员, 缩短了仪器反应时间, 避免形成过多的无效进尺, 方便导向人员快速做出决策, 从而确保了钻井地质导向的实时性(图1)。
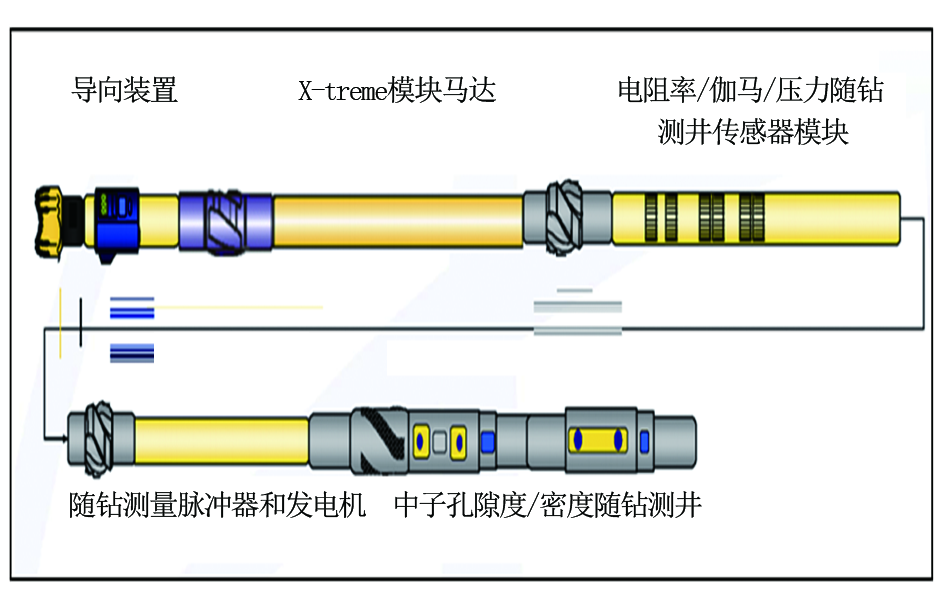 | 图1 旋转导向随钻成像测井系统井下设备组合示意 |
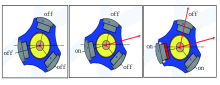
不同于常规的定向仪器采用单弯螺杆进行造斜, 该系统利用位于导向头内三块互成120° 夹角的推靠肋板将不同大小的力施加在井壁上, 以其产生的反作用力的矢量和来控制井斜和方位的增减。造斜能力可达5° /10 m, 精度可达± 0.1° , 在造斜能力和对井眼轨迹的控制方面都明显优于常规定向仪器(图2)[4, 5]。
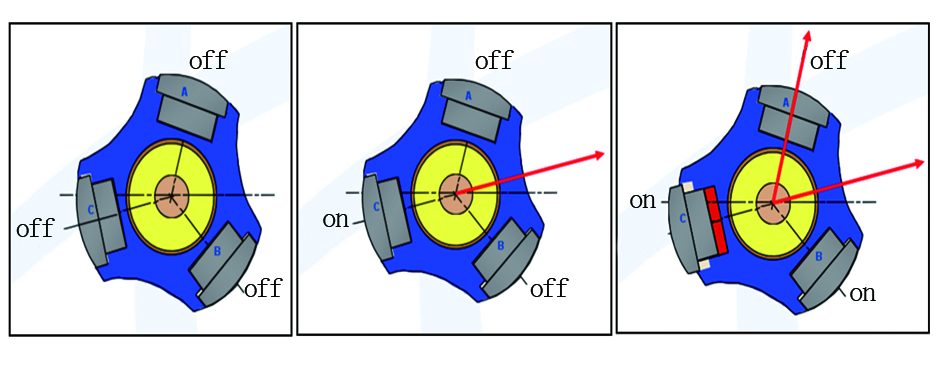 | 图2 导向头推靠肋板工作原理示意 |
为验证旋转导向随钻成像测井系统的应用效果, 选取苏里格气田苏东南致密气水平井示范区内的一口施工难度较大的水平井JX-H 2井作为试验井。该井位于陕西省榆林市榆阳区红石桥乡马路湾村, 设计水平段长度2 000 m。由于该井周围井控程度低, 砂体识别难度大, 周边邻井储集层钻遇率普遍偏低。
在开始实施水平段钻井前, 先结合本井斜井段入靶随钻伽马数据与3口已完钻邻井(G 1-17、G 1-14、J 72-57井)的电测数据进行了地层剖面连井对比(图4), 确认其沿水平段延伸方向主力层整体呈上倾趋势, 从宏观上把握了区域地层的整体特征。
 | 图4 JX-H 2井邻井区域地层剖面对比 |
JX-H 2井自3 146 m开始进入水平段钻井, 在水平段钻进过程中, 旋转导向随钻成像测井系统分别在井深3 290、3 414、3 492、3 823、4 075、4 937 m共6个重要的关键控制点成功预测了地层变化(图5), 及时调整了钻进的井斜和方位, 使即将偏离储集层的井眼轨迹重新回到储集层中穿行, 确保该井水平段较高的目的层钻遇率, 从而验证了其可靠性。
 | 图5 JX-H 2井实钻轨迹 |
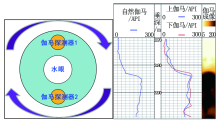
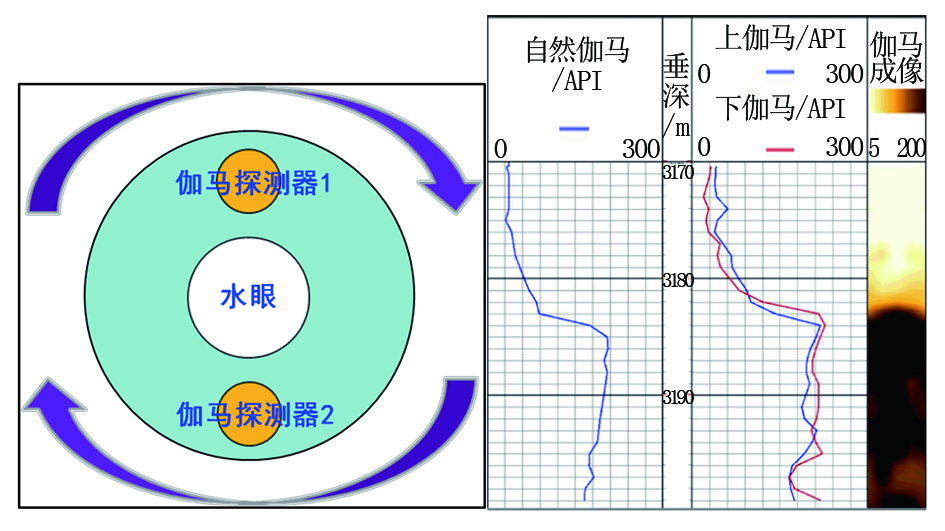
在该过程中经历的6次地层岩性变化, 随钻方位伽马成像图中均有明显的预测反映。在储集层中触底高伽马地层时成像图显示呈“ ▲” 型; 在储集层中触顶高伽马地层时成像图显示呈“ ▽” 型; 在上探进入低伽马储集层时成像图显示呈“ ▼” 型; 在下探进入低伽马储集层时成像图显示呈“ △ ” 型。伽马成像图准确预测到每次构造变化的趋势, 为现场人员提供了明确的下步导向思路。
(1)井深3 290 m:构造下倾, 在储集层中下探, 成像伽马显示下切高伽马层, 泥质含量升高, 无气测, 由于局部构造微幅上倾, 触底高伽马泥岩层段。
(2)井深3 414 m:在泥岩层段中上探, 成像伽马显示上切进入低伽马层, 全烃气测值由1%~2%升至10%~30%, 重新进入低伽马储集层。
(3)井深3 492 m:构造上缓, 在储集层中上追, 成像伽马显示上切高伽马层, 泥质含量升高, 无气测, 由于局部构造微幅上倾, 触底高伽马泥岩层段。
(4)井深3 823 m:在储集层中调整井斜, 成像伽马显示下切低伽马层, 全烃气测值由0.5%~1%升至2%~16%, 为保证井眼轨迹平滑, 逐步调整井斜。
(5)井深4 075 m:构造上倾, 在储集层中上探, 方位伽马下伽马由30~60 API升高至130~160 API, 全烃气测值由12%~19%降至1%~2%。由于局部构造小幅上倾, 触底高伽马泥岩层段。
(6)井深4 937m:构造上倾, 在储集层中上探, 方位伽马下伽马60~80 API升高至170~200 API, 全烃气测值由7%~10%降至0.9%~1.6%。由于局部构造小幅上倾, 触底高伽马泥岩层段。
JX-H 2井最终完钻井深5 121 m, 水平段长度1 975 m, 钻遇储集层长度1 567 m, 储集层钻遇率为79.34%, 较常规导向提高5%; 钻遇气层长度1 441 m, 有效储集层钻遇率为72.96%, 较常规导向提高10%。钻遇效果良好, 显示出旋转导向随钻成像测井系统在钻井地质导向过程中具有以下突出效果。
基于近钻头井斜、方位成像伽马等技术, 较常规导向方法可提前预判地层, 具备了前端控制、实时调整、可视化引导等新型钻井导向技术, 根据导向人员的需求将井眼轨迹严格控制在储集层范围内, 真正实现了精确导向(表1)。
| 表1 方位伽马判断井眼轨迹与储集层空间位置关系 |
该系统采用全程动力马达复合钻进, 无需滑动定向, 避免了使用常规定向仪器带来的托压和工具面摆放困难等问题, 水平段机械钻速相比使用常规定向仪器提高了0.81 m/h, 水平段钻井周期由常规45 d缩短至32 d, 缩短了近30%, 钻井提速效果明显。
中油测井公司的旋转导向随钻成像测井系统在苏里格气田苏东南致密气水平井示范区中的成功应用, 有效解决了该区因井控程度低, 有效砂体认识不明确, 以及常规定向仪器零长较大, 在井斜调整过程中速度缓慢, 导致有效目的层钻遇率偏低的难题。应用结果表明, 该系统可实现水平井精确地质导向, 并可提高机械钻速, 缩短钻井周期, 为后续水平井的高质高效开发奠定了可靠的基础。
(1)为地质导向提供有力依据。旋转导向随钻成像测井系统可引导钻头在储集层中最佳位置钻进, 实时判识岩性变化, 对于微幅构造的识别能力强大, 可为导向人员提供强有力的导向依据, 协助导向人员及时做出下步调整决策。
(2)钻井效率大幅提升。旋转导向随钻成像测井系统持续供电能力强, 可减少起下钻次数, 缩短摆放工具面、定向划眼等无效等停时间, 机械钻速大幅提高, 使得井眼轨迹平滑, 消除了托压现象, 钻井施工效率获得大幅提高。
(3)实现对井斜的精准控制。旋转导向随钻成像测井系统具有突出的造斜能力, 消除了传统导向技术的人为和设备影响因素, 实现了对井斜的高精度控制, 在高难度水平井斜井段入靶及水平段侧钻方面都具有很好的应用前景。
(4)实现了水平井水平段随钻实时电测。旋转导向随钻成像测井系统仪器随钻携带多参数配置, 可以替代常规伽马测井, 可提供更为丰富的储集层信息, 准确判断井眼轨迹与储集层的相对位置关系, 实现了钻测一体化, 弥补了传统水平井水平段不进行电测的空白, 为水平井钻后的改造试气提供了更加有力的支撑。
(编辑 唐艳军)
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|