


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
全自动液位自调式脱气器的研制与应用
[曾红恩 , 王国庆, 许爱生, 高峰, 韩柱, 何标儒]
, 王国庆, 许爱生, 高峰, 韩柱, 何标儒]
, 王国庆, 许爱生, 高峰, 韩柱, 何标儒]
|
|


作者简介:曾红恩 高级技师,1976年生,1997年毕业于胜利油田测井技校测井专业,现在中石化经纬有限公司胜利地质录井公司从事录井现场工作。通信地址:257055 山东省东营市东营区德州路57号胜利地质录井公司。电话:13685468848。E-mail:reden@126.com
录井现场缓冲罐内钻井液液面常随着泵排量、井底复杂情况的变化及一些人为因素影响而上下波动,为了使脱气器能够稳定脱气,需要根据钻井液液面变化对其进行人工调节。否则,钻井液液面过高易造成抽钻井液堵塞气管线,烧毁电机;钻井液液面过低脱不到钻井液,导致丢失气测数据。为节省人力、保证气测数据的准确性和及时性,研发了全自动液位自调式脱气器,可通过超声波液位传感器对液面高度进行测量,进而驱动电机对脱气器吃液高度上下调节,自动应对缓冲罐内液面起伏、钻井液气泡过多等复杂情况。与传统脱气器相比,全自动液位自调式脱气器改变了调节驱动模式,实现了脱气器吃液高度自动调节,从而降低了劳动强度,提升了设备运行可靠性和本质安全,提高了气测录井数据的质量。
The drilling fluid level in the buffer tank at the mud logging site often fluctuates up and down with the changes of pump displacement and bottom-hole complex situations, and the influence of some human factors. In order to stabilize degassing, the degasser needs to be manually regulated according to the changes of drilling fluid level. Otherwise, if the drilling fluid level is too high, it may cause the pumping drilling fluid to block the gas pipeline and burn the motor.If the drilling fluid level is too low to degas the drilling fluid, resulting in the loss of gas logging data. In order to save manpower and ensure the accuracy and timeliness of gas logging data, the full automatic level self-regulating degasser has been researched and developed, which can measure the level height through the ultrasonic liquid level sensor, then drive the motor to regulate the liquid intake height of the degasser up and down, and automatically deal with the complex situations such as level heave and excessive drilling fluid bubbles in the buffer tank. Compared with the traditional degassers, the full automatic level self-regulating degasser changes the regulation drive mode, realizes automatic regulation for the liquid intake height of the degasser, thereby reducing labor intensity, improving equipment operation reliability and inherent safety, and enhancing the quality of gas logging data.
气测录井是钻井过程中实时发现油气显示、辅助落实岩屑含油性最直接、最有效的录井技术手段。为了从返出的钻井液中持续得到准确的气体含量数据, 把握第一手的真实原始资料, 需要现场气测录井辅助设备更加智能化、人性化。电动脱气器是破碎钻井液, 析出烃类气体的最主要辅助设备, 其脱气效率又是最为关键的技术指标之一, 而脱气器的吃液深度则与脱气效率密切相关。Q/SH 1020 1767.1-2024《地质录井现场质量控制技术规范 第一部分:综合录井仪》规定, “ 脱气器安装高度以钻井液排出量占钻井液排出口总面积的三分之一至三分之二为宜” 。在实际录井过程中, 脱气器安装高度固定, 缓冲罐钻井液液面高度上下波动, 使得脱气器在使用过程中会出现钻井液液面过高抽汲钻井液进样气管线, 烧毁电机或液面过低造成脱气器脱空, 丢失气测数据等问题。由于现场录井人员无法在仪器房内对缓冲罐的液面高度直接感知, 只能根据泵排量、出口流量、气测值等的异常变化来猜测是否存在问题, 这种经验并不是百分百准确, 带来的后果可能就是气测资料缺失或设备损坏。如果现场作业人员频繁登上振动筛去观察脱气器吃液深度, 则极大增加了作业人员的劳动强度和安全风险。现有的自动升降脱气器普遍存在体积过于庞大、结构过于笨重, 致使功能拓展受限, 自动化程度低, 无法解决泡沫钻井液影响等缺陷。因此, 通过设计全自动液位自调式脱气器, 实现脱气器高度自动调节、无需人为干预、操作简单、维护方便、气测出值稳定及能够自主应对突发情况的能力。
全自动液位自调式脱气器的设计原则如下:
(1)整体采用模块化设计, 安装维护方便; (2)智能化控制, 利用PLC编程设计运行程序; (3)不改变传统脱气器脱气筒结构, 与传统脱气器脱气方式相同[1]; (4)进行功能拓展后, 符合录井现场设备运行规范; (5)操作简单, 自动化程度高, 能够自主应对现场复杂情况。
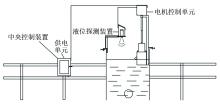
该型脱气器主要由供电单元、液位探测装置、电机控制单元、中央控制装置4部分组成(图1)。供电单元供给整组设备用电, 中央控制装置接收液位探测装置传来的信号, 发送控制信号给电机控制单元控制脱气器丝杠杆进行动作, 始终控制脱气器高度处于缓冲罐内最佳钻井液液面位置, 从而实现脱气器全自动液位自调的目的[2, 3, 4]。
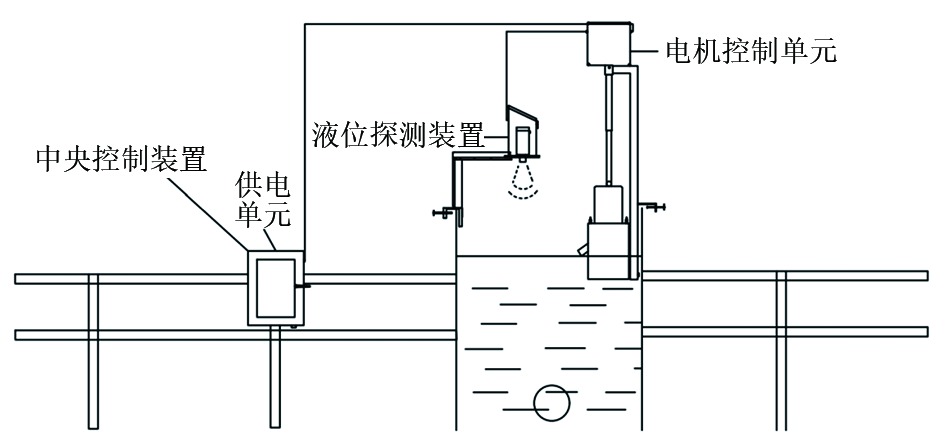 | 图1 全自动液位自调式脱气器设计图 |
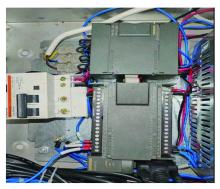
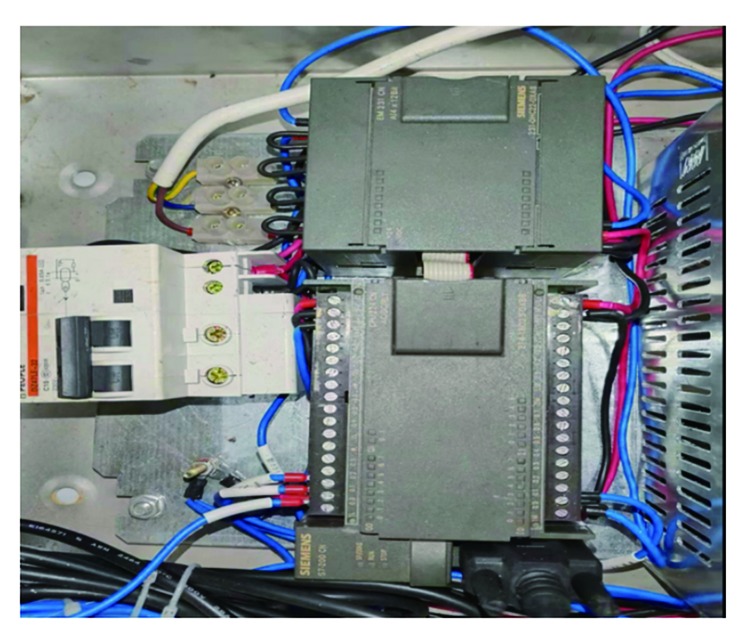
全自动液位自调式脱气器供电方式有两种:(1)主体供电单元采用220 V交流电, 开关为PEOPLE品牌DZ47LE-32型, 稳压电源为MS-50-24型, 额定功率50 W, 输出电压24 V直流电(图2), 由485信号箱供电; (2)电动脱气器电动马达为380 V直流电, 由仪器房直接供电。
 | 图2 供电单元开关与电源 |
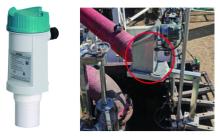
在缓冲罐的侧方(要求此处无沉砂或沉砂较少且无遮挡)安装一支超声波液位传感器(图3), 通过测量罐内钻井液的液面高度得到4~20 mA电流信号, 并传入软件设置单元(中央控制装置)。超声波液位传感器测量精度1 mm, 响应时间10 ms, 供电为24 V直流电, 盲区300 mm。液位探测装置经由电机控制装置与中央控制装置连接, 将采集的即时液位高度信息传输至中央控制装置进行运算分析, 为电机控制单元提供上升或下降的“ 指令信息” 。
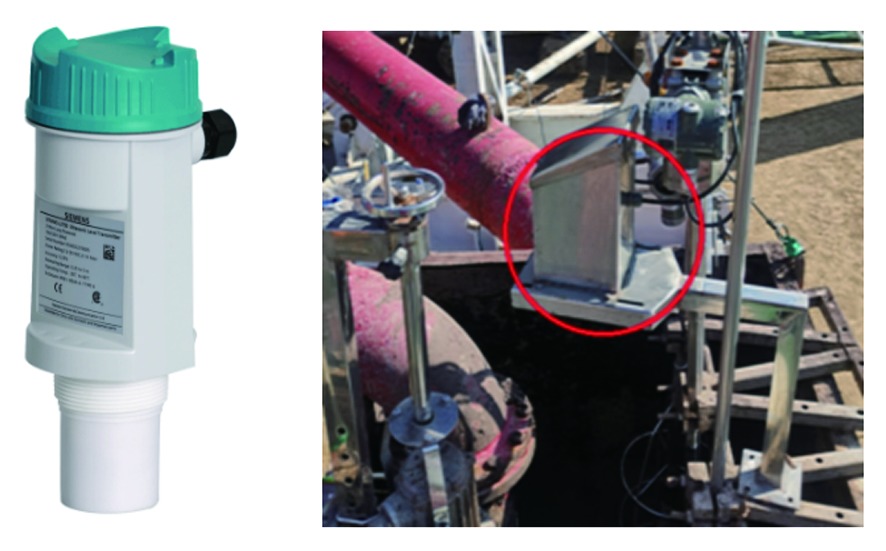 | 图3 西门子超声波液位传感器现场安装示意 |
现场设计使用西门子超声波液位传感器装入“ L” 型体积支架后安装在缓冲罐侧方(图3)[5, 6], 此处可以平稳监测缓冲罐内钻井液液面高度。
1.3.1 电机控制装置
新型脱气器需要卸去原有电动脱气器自带的调节手轮, 在传动轴丝杠杆处安装简易感应铁片。将小型驱动电机(图4)安装到丝杠杆头部, 电机通过多芯信号线连接到中央控制装置, 在接收到中央控制装置信号后, 驱动电动脱气器丝杠杆正转或反转以调节脱气器吃液高度。电机控制装置的供电装置按国际安全用电要求设计, 采用24 V直流电, 使用WS-60型775微型电机, 功率25 W, 转速25 r/min。
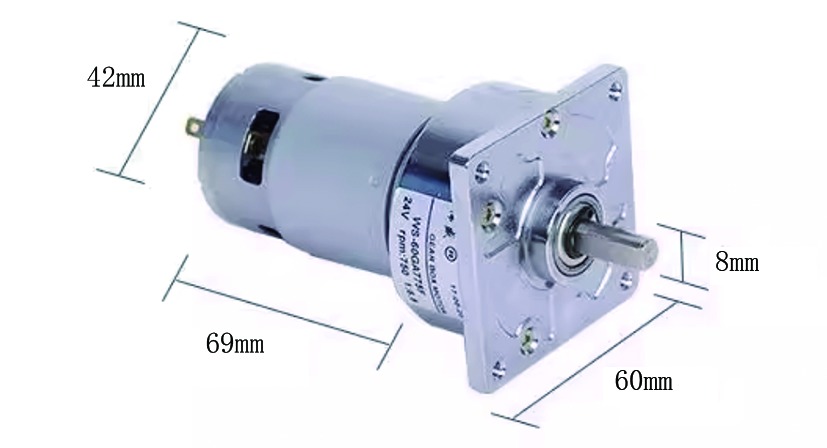 | 图4 驱动电机示意 |
1.3.2 防爆接线盒
防爆接线盒采用符合国家标准的防爆盒, 符合现场施工安全标准, 型号为BJX-T, 防爆等级IP 65, 额定电压220/380 V交流电, 防爆标志ExdellBT4Gb/tD A21 lP65, 合格证号SYEx18.11104。在防爆盒左右两侧分别安装有电源输入口、信号接入口, 防爆盒内部设计接线排、小型继电器。防爆接线盒可以直接安装在传统脱气器丝杠杆顶部, 重量轻、体积小, 对安装环境没有特殊要求。
1.3.3 霍尔感应元件
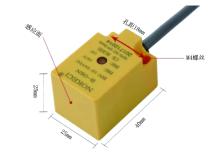
本装置使用霍尔感应元件(图5)进行脉冲信号计数测量, 通过传动轴处安装的简易感应铁片感应传动轴丝杠杆旋转的圈数, 并由信号线将圈数信号上传至中央控制装置的PLC控制器中分析, 计算出脱气器上升或下降的高度。
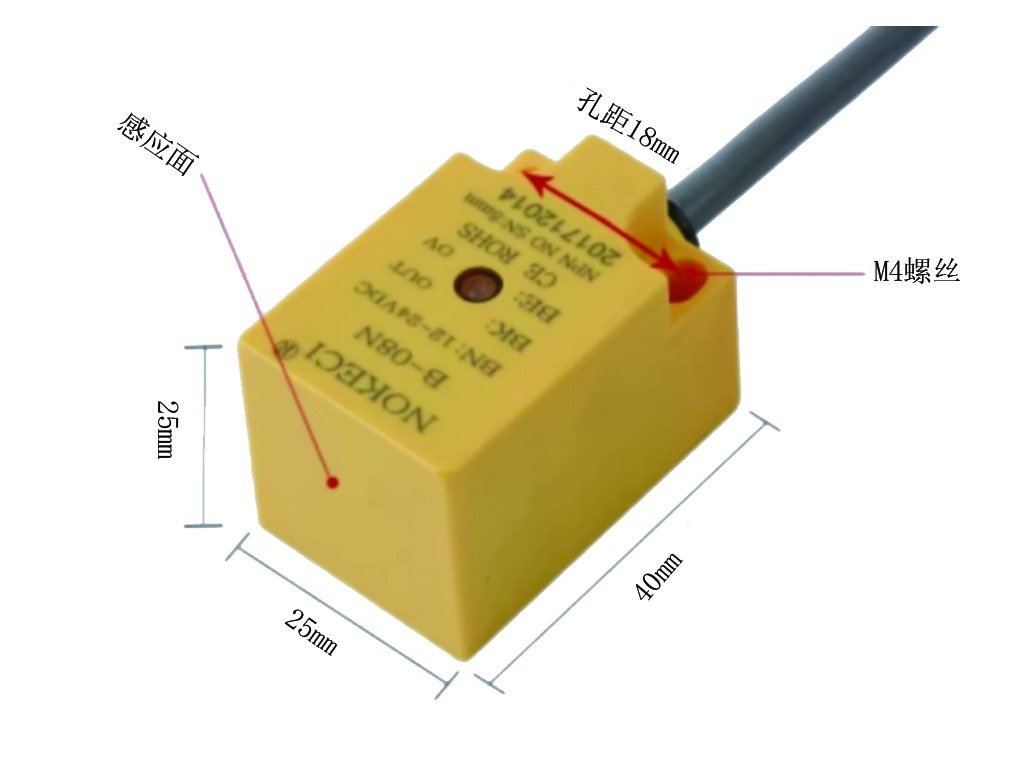 | 图5 霍尔感应元件示意 |
该装置具有电机保护功能。当脱气器上升或下降至阈值时, 传动轴丝杠杆无法再进行转动, 霍尔感应元件在设定时间内(5 s)没有感应到传动轴旋转的脉冲信号, 装置会自行进入保护状态, 停止旋转从而保护电机及电动脱气器, 即到顶或到底停止转动。
中央控制装置是整个全自动液位自调式脱气器的“ 大脑” , 是实现全自动液面自调功能的处理单元, 由中央控制箱、触摸屏控制装置、PLC控制器组成, 中央控制箱供电为220 V。
1.4.1 中央控制箱
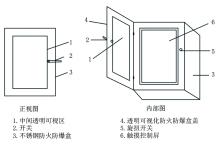
中央控制箱因为长期在室外安放, 设计使用不锈钢材质, 主体尺寸长300 mm、宽200 mm、高400 mm, 在前面板设计有长150 mm、宽150 mm可视化透明窗(图6), 可在不打开箱体的情况下观察数据。此箱体具有防火防爆功能, 并可根据现场情况安放在有利于工作的地方, 如仪器房内、地质房内或缓冲罐壁外等。此箱体一侧有控制线缆接口, 下部有电源线接口。
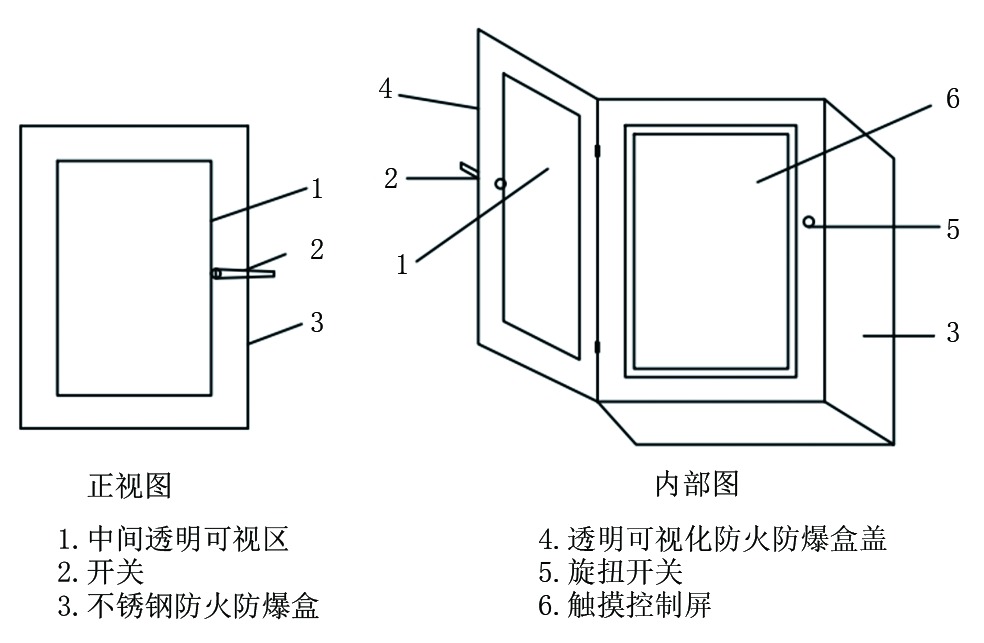 | 图6 中央控制装箱示意 |
1.4.2 触摸屏控制装置
触摸屏控制装置采用7 in(177.8 mm)高亮度TFT液晶显示屏(分辨率800× 480 dpi), 四线电阻式触摸屏(分辨率4 096× 4 096 dpi), 还预装了MCGS嵌入式组态软件(运行版), 具备强大的图像显示和数据处理功能。触摸屏软件控制分为两部分:一是初始设置, 内容包括液位传感器最高水位, 取样离地距离等; 二是主界面, 显示内容有测量范围、离地距离、液位传感器水位、取样器高度、手动控制和自动控制切换等按键。自动模式下, 无需人工操作, 液位全自动调节装置全程自动调节脱气器的高度; 在手动模式下, 也不需要人工爬高去旋转手轮进行调节, 只需要在触屏处切换至手动控制, 简单按键即可完成对脱气器高度的调节。不仅维护保养方便, 而且在发生不可抗拒的情况时, 也可手动调整脱气器高度到需要的位置。
1.4.3 PLC控制器
PLC控制器(图7)经过西门子Micro step7编程, 以梯形图完成程序设计[7, 8]。通过收集超声波液位传感器的液位高度数据, 以及人工设置的理想脱气器高度(可经由触摸屏控制装置直接设置)进行计算, 将控制信号反馈至电机控制装置, 由电机控制装置控制脱气器完成高度调节。该程序可以实现高度调节速度、自动调节滞后时间等多项参数的设定, 具有可拓展性, 配以方便易用的向导设置功能, 快速实现设备调速、定位等功能。PLC扩展模块可扩展通信端口、数字量模块、模拟量模块等, 能更加贴合实际配置, 提升利用率, 同时降低扩展成本。
 | 图7 S7-200CN西门子PLC控制器 |
将全自动液位自调式脱气器各部件安装连接后, 模拟缓冲罐液面高度(手持超声波液位传感器于100 cm高处)。同时, 对软件进行初始设置:(1)液位传感器最高水位120 cm; (2)取样器离地距离20 cm; (3)主监控界面设置为自动控制。
主监控界面显示:测量范围120 cm, 离地距离20 cm, 液位传感器水位100 cm。当手持超声波液位传感器向下移动至80 cm处时, 驱动电机得到信号进行反向旋转, PLC控制器通过计数驱动电机反向旋转10圈左右停止转动, 霍尔感应元件检测到丝杠杆旋转触点信号, 主监控界面显示液位传感器水位为80 cm, 脱气器集气筒向下移动20 cm, 停止不动等待下一信号; 当手持超声波液位传感器向上移动至110 cm处时, 驱动电机得到信号进行正向旋转, 同时霍尔感应元件检测到丝杠杆旋转触点信号, 霍尔信号传至PLC控制器, PLC控制器通过计数驱动电机正向旋转15圈左右停止转动, 脱气器向上移动30 cm。测试可知, 脱气器能够通过液位自调实现脱气器高度的全自动调节。
当缓冲罐内出现泡沫钻井液时, 可通过软件设置来规避泡沫影响, 在软件初始化设置界面将脱气器的吃液深度设置成泡沫高度数据, 即取样器离地距离是泡沫高度。将脱气器手动调整至钻井液最佳吃液高度, 然后启动软件为自动控制, 超声波液位传感器测量泡沫高度输出给中央控制装置, 中央控制装置以泡沫高度为基数控制脱气器的上升、下降, 即中央控制装置接收信号负责电机控制单元转多少圈、正转或反转。这就有效避免了钻遇泡沫钻井液时的脱气器液面控制问题。
全自动液位自调式脱气器在胜利油区进行了5口井现场测试应用(图8), 正常运行426 d, 共10 224 h。脱气器能够随着缓冲罐内钻井液面的高度变化而自动调节高度, 无需人为操作, 钻井液占脱气器排液口截面始终处于三分之一至三分之二的技术标准之内。
 | 图8 现场测试应用图 |
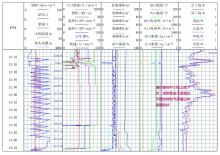
图9为传统脱气器采集气测值曲线。该井在循环过程中司钻不断对大钩进行上提下放操作, 大钩高度随之上下移动, 导致缓冲罐内的钻井液液面忽高忽低, 脱气器脱气效率不稳定, 气测曲线呈现出明显的锯齿状, 气测值不能真实反映当时钻井液内的烃类气体含量。
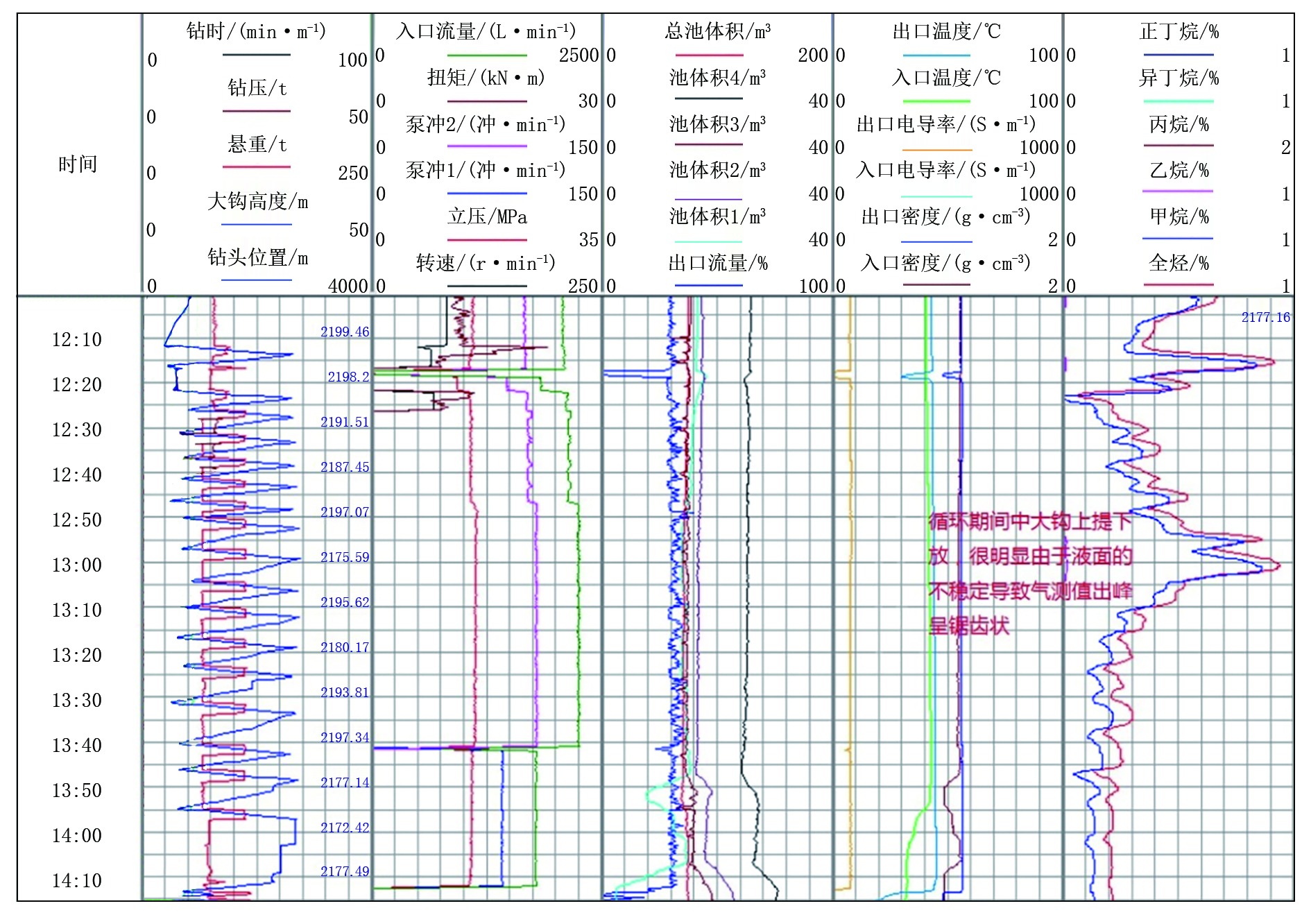 | 图9 传统脱气器采集气测值曲线 |
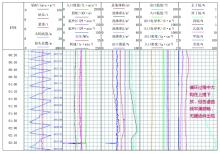
图10为全自动液位自调式脱气器安装后采集到的气测值曲线。循环过程中同样的操作, 缓冲罐内的钻井液液位也是忽高忽低, 全自动液位自调式脱气器随着液面的上升或下降不断调整脱气器的吃液高度, 脱气效率稳定, 气测曲线平滑顺畅, 气测值真实可信, 准确度更高。
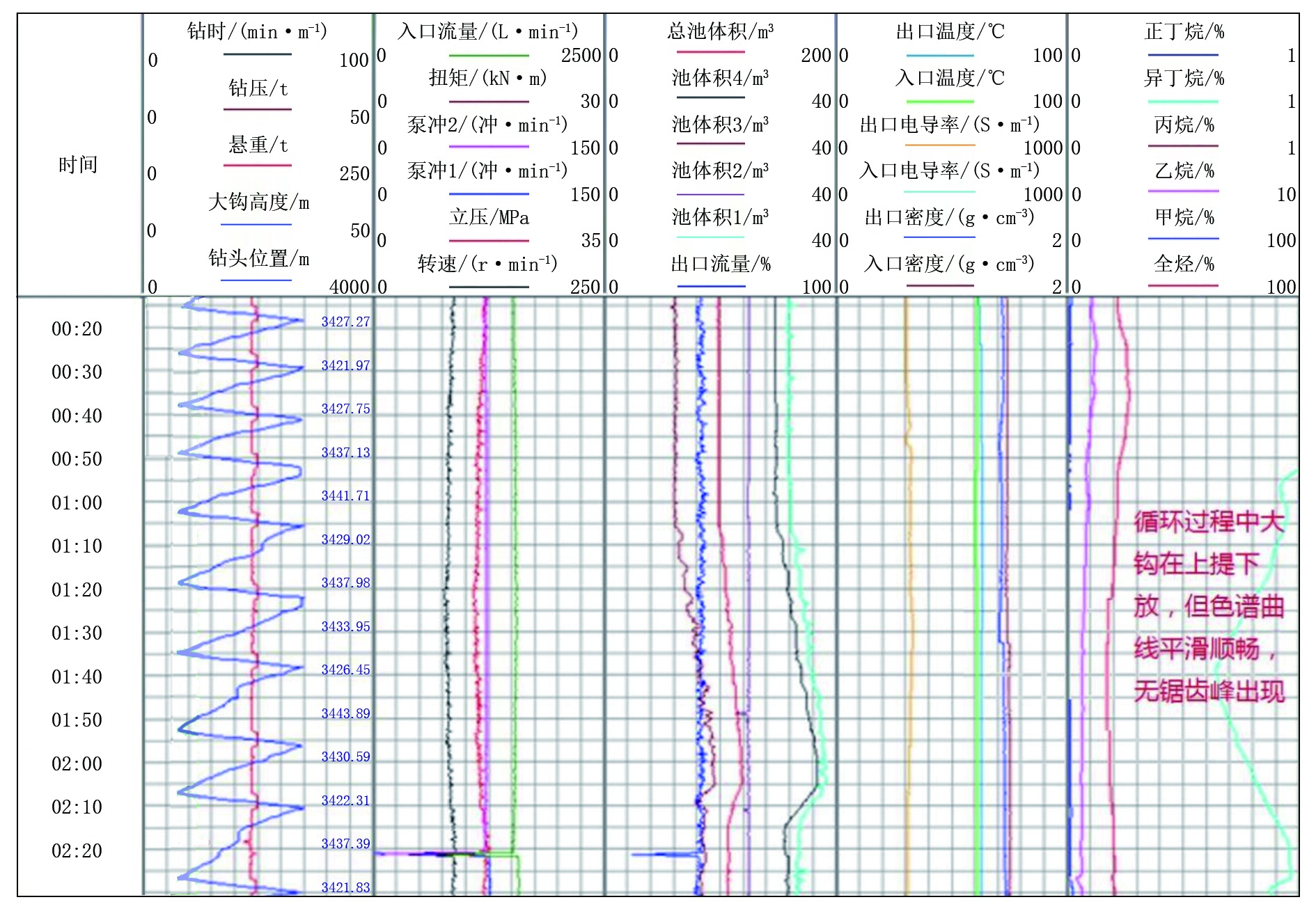 | 图10 全自动液位自调式脱气器采集气测值曲线 |
(1)因泵排量变化、遭遇油气侵、人为操作失误等异常情况而导致钻井液液面上下波动、不稳定时, 全自动液位自调式脱气器能够实时自动准确地调整脱气器吃液高度, 保证脱气器始终处于最佳脱气高度。
(2)全自动液位自调式脱气器没有改变传统脱气器的脱气筒结构, 仅需很小的改动就完成了脱气器的自动化升级。
(3)全自动液位自调式脱气器能有效消除泡沫钻井液带来的脱气器液面控制问题。该脱气器减轻了作业人员的劳动强度, 减少了安全隐患, 提升了脱气器的使用效率, 并在实际使用中维护更加方便。
编辑 郑春生
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|