
{kind=link}
{kind=link}
{kind=link}
雷达液位传感器的研制与钻井现场应用
[张良①  , 谢平
, 谢平① , 许铁成② ]
, 谢平|
|


作者简介:张良 工程师,1991年生,2013年毕业于成都理工大学资源勘查工程专业,现在上海神开石油科技有限公司从事高新装备技术研发制造与推广应用工作。通信地址:201114 上海市闵行区浦星公路1769号。E-mail:759929332@qq.com
针对油气田井场钻井液出口缓冲罐液位监测中出现的超声波液位传感器易受环境干扰、测量精度不足等问题,提出了一种采用78 GHz调频连续波(FMCW)的雷达液位传感器改进方案。通过波束角优化设计与抗干扰信号处理算法,实现了毫米级测量精度(误差为±3.2 mm)与窄波束(≤6°)覆盖特性。在西南油气田W 204HX-X井的应用表明,该传感器在剧烈液面波动场景下较超声波传感器准确性提高79.6%、数据稳定性提升16.2%,有效克服了高温烟、水雾等环境干扰导致的测量偏差并提升了监测稳定性。研究结果揭示并扩展了高频雷达技术在复杂工业环境中的适用边界,无论从成本还是功效上比较,都可以替代传统的超声波液位传感器,为钻探过程中钻井液液面智能监测装备的研发应用提供了新的技术路径。
To tackle the limitations of ultrasonic wave liquid level sensors in drilling fluid outlet buffer tank level monitoring at oilfield drilling sites, which particularly include susceptibility to environmental interference and insufficient measurement accuracy. The improvement plan for 78 GHz Frequency-Modulated Continuous Wave (FMCW) radar liquid level sensor is proposed in this study, which achieves millimeter-level precision (error of ±3.2 mm) with narrow (≤6°) by optimizing beam angle and anti-jamming algorithms. Application to well W 204HX-X in Southwest Oil & Gas Field demonstrated that superior performance: compared to ultrasonic wave sensors, the radar sensor improved measurement accuracy by 79.6% and data stability by 16.2% under severe liquid surface fluctuation conditions. The technology effectively overcomes measurement deviations caused by high-temperature smoke and water mist interference while enhancing monitoring stability.This research reveals and expands the applicability boundaries of high-frequency radar technology in complex industrial environments. Both cost-benefit analysis and functional evaluations confirm its viability as a replacement for traditional ultrasonic wave level sensors. The findings provide a novel technical pathway for intelligent drilling fluid level monitoring equipment development in oil and gas drilling operations.
随着页岩气开发向深层延伸, 井场钻井液液位的实时精准监测成为保障钻井安全的核心环节。钻井液具有多项核心功能, 保障钻井液性能的工作在钻井、录井等工程现场施工过程贯穿始终, 在平衡地层压力、判断井涌和井漏等方面发挥着巨大作用, 钻井液实时监测是现场井控安全工作的重中之重。
传统的钻井液液位实时监测手段分为接触式测量和非接触式测量。早期应用的是接触式测量, 测量类型包括静压式、电容式、浮力式[1], 其中浮力式在钻探现场中应用最为广泛, 但其缺点和局限性在于自动化程度低、易受粘稠液体或杂质影响导致堵塞或失准。在出口流量的监测上往往选择靶式流量传感器, 其原理是基于钻井液流体连续性原理和伯努利方程建立相关函数关系, 通过靶摆角位移反映钻井液流量相对变化, 因其安装位置较高不便于日常维护保养, 而且较高密度钻井液特别是油基钻井液中的粘稠组分易干涸粘附在靶体上, 往往导致监测失准[2]。
非接触式测量传感器相继研发应用于钻井现场, 包括超声波液位传感器和雷达液位传感器。超声波液位传感器虽然造价成本低廉但易受水雾、泡沫干扰, 在高压或复杂气体环境中检测距离可能缩短或波动较大, 降低使用寿命; 雷达波兼具激光测距技术的高速测量准确性, 在规定的基本检验周期内基本不会测量失准, 因而可以不用校准。而雷达液位传感器特点是抗干扰性能好、耐高温高压、可测量惰性气体等, 而且在实际应用场景中其测量更加精确、耐老化性好、安装方便且使用寿命长[1, 2, 3, 4], 雷达液位传感器适用于含蒸汽、泡沫或剧烈波动的液面场景(如钻井液罐), 测量精度可达毫米级, 具有抗高温、高压、腐蚀性介质的特性。
在钻井现场恶劣复杂的作业环境下, 传统的非防爆超声波液位传感器已逐渐不能满足未来数智化油田趋势的需求, 其存在两大技术瓶颈:一是受井筒水雾干扰导致液位高度测量误差超过± 15 mm[4]; 二是宽波束角(> 20° )易受罐壁反射干扰[5]。针对目前亟待解决的易受水雾干扰、波束角过大等关键技术问题, 为优化和扩展传感器算法和性能, 在雷达液位传感器明显优于超声波液位传感器的基础上, 本文开展了国产高频抗干扰雷达液位传感器的开发与应用研究, 力求解决困扰现场多年的超声波液位传感器存在的缺陷和技术难题。
针对目前亟待解决的传感器易受水雾干扰、波束角过大等关键技术问题, 开展了国产高频抗干扰雷达液位传感器的开发与应用研究。在大量前期实验工作的基础上研制出基于调频连续波(FMCW)的雷达液位传感器系统, 其主体雷达液位传感器成本可控, 与高端超声波液位传感器成本基本接近。
该调频连续波雷达液位传感器属于非接触式安装设计, 其特点是体积小巧、结构紧凑、精度高、功耗低、抗干扰能力强, 目前广泛适用于湖泊河流、蓄水池、污水管网等水位监测。传感器正常工作时, 其探测平面与水平面呈平行状态, 通过向水平面发射雷达波, 并对水平面反射的雷达回波进行分析处理和计算, 最终得到传感器探测平面与水平面之间的精确距离和液位高度值。
本次技术解决方案中雷达液位传感器设备采用了各种高端、智能自动化技术, 致力于提高传感器数据采集的准确性、稳定性, 在信号处理算法与模型上也进行了技术创新。本技术方案的研究立足于高端装备国产化替代的基调, 其主要创新点在于:①突破性采用78 GHz高频段雷达技术; ②建立液面波动与雷达回波衰减的量化模型; ③开发基于时频域融合的自适应滤波算法; ④构建工业防爆场景下的长距离RS-485通信协议栈。
传感器模块主要采用国产的主控与军工技术转民用的自研毫米波芯片, 测试性能基本接近进口产品水平。
通信链路主要采用Modbus-RTU协议, 60 m传输距离下误码率< 10-6(实测数据), 经过不断优化与改进, 保障长距离传输下数据稳定性得到提升。
为了解决关键性的抗干扰技术问题, 在硬件设计中有效降低波束宽度是非常必要的, 因此在研发设计本系统时着重针对波束宽度进行优化和改造, 经过不断试验, 将毫米波雷达波束宽度控制在6° 及以内(图1), 波束宽度(D)与安装高度(H)关系满足:D=2Htan3° =0.104 815H≈ 0.1H。
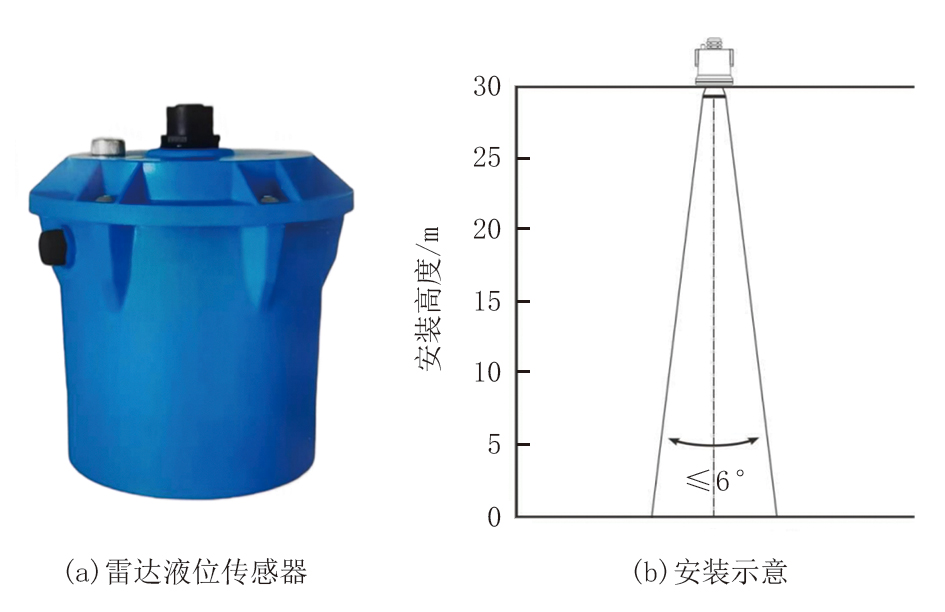 | 图1 雷达液位传感器照片及安装示意 |
1.3.1 基于时频域融合的自适应滤波算法
将回波信号(χ )按长度为N的分析窗分段加窗, 记每段为χ (n)(0≤ n≤ N-1), 对每段执行快速傅里叶变换(FFT), 得到公式(1)中的频域信号(X(k)), 结合欧拉公式组成时频转换模块。
式中:k为频点索引; N为窗长; n为时域信号采样点索引或窗函数内的位置索引; j为虚数单位。
利用频域最小均方(FLMS, Frequency-domain Least Mean Square)算法对公式(1)中的频域信号(X(k))进行自适应权值更新, 即通过迭代公式调整频域权值W1(k); 再根据W1(k)与X(k)逐点乘积运算得到频域滤波信号(Y(k)), 由期望响应信号与(Y(k))的差值计算频域误差信号(E(k))代入公式(2), 滤波器的权重系数在频域的表示如下:
W1(k+1)=W1(k)+μ ∙ E(k)∙ X(k) (2)
式中:μ 为收敛因子(需满足0< μ < 1/ρ max, ρ max为输入信号相关矩阵最大特征值); E(k)为频域误差信号。
在获得经频域滤波处理后的输出信号后, 将其与预设的期望响应信号进行比对; 期望响应信号可由液位真实变化的先验模型、参考传感器数据或历史统计均值生成, 能够代表在无干扰情况下液位信号在频域的理想表现; 通过逐频点比较滤波信号与期望响应信号的幅值与相位差异, 得到频域上的残差信号。由于存在液面波动引起的散射、多径回波叠加及现场电磁干扰, 仅依赖单一域的滤波难以彻底消除噪声。而通过将频域误差信号反馈至时域滤波器, 可以在时间序列上进一步削弱残余干扰成分, 从而提升滤波输出对液面真实回波的保真度。
将公式(2)中的频域误差信号(E(k))通过逆快速傅里叶变换(IFFT)转换回时域, 得到时域误差信号(e(n)), 时域误差信号修正计算公式如下:
式中:0≤ k≤ N-1; Re表示取实部的运算。
根据得到的时域误差信号
式中:Q为时域步长因子; ψ (n)为回波信号χ 在预设采样窗口内的连续采样值构成的输入信号向量, 其范数参与公式(4)的运算; ϵ 为防除零常数。
最后将W2(n)进行权值参数转置后与ψ (n)逐点乘积运算, 得出时域自适应滤波器输出的时域滤波信号(ytime(n)), 根据时频域加权机制对时域滤波信号(ytime(n))和频域滤波信号(Y(k))进行逆快速傅里叶(IFFT)变换后, 提取实部运算所得滤波结果进行加权融合, 最终通过时频域融合策略得到时频融合后滤波输出结果(yout(n)):
yout(n)=λ · ytime(n)+(1-λ )· Re(IFFT(Y(k))) (5)
式中:λ 为融合权重(通过信号信噪比动态调整)。
1.3.2 建立液面波动与雷达回波衰减的量化模型
当雷达波波束宽度降至足够低时, 对抵抗待测液体所处环境中的其他干扰因素卓有成效, 但待测液面本身波动较剧烈时的抗干扰性降低问题就变得尤为突出, 液面起伏改变雷达波入射角, 引发散射能量分布变化, 而湍流与气泡等干涉因素会加剧回波信号的相位噪声和波动幅度。通过麦克斯韦方程组演算变换得到的波动方程与介质边界条件结合求解, 解的形式决定输出的雷达波衰减系数(α ), 实际应用中需结合边界条件修正衰减模型, 这使信号强度随速度指数衰减的相关性拟合成为突破重点。经实验室VOF(Volume of Fluid)多相流模型模拟液面波动, 耦合波动方程进行时域反射分析, 进而在雷达信号去噪和回波重构中, 通过小波变换(Wavelet Transform)多分辨率分析优化信噪比, 采用基于时频域融合的自适应滤波算法, 不断校正完善模型和优化算法。然后通过雷达波衰减系数(α )与被干涉信号的函数关系, 从数据集内获取有效参数和相位数据, 再基于相位信息反演液面高度变化
式中:c为电磁波在传播介质中的速度, 接近光速; ℑ为提取相位数据虚部的运算函数; ℜ为提取相位数据实部的运算函数; SIF为信号干涉因子; β 为罐体阻尼系数; v为液面波动速度(通过快速傅里叶变换FFT频谱分析获取)。
从自适应滤波算法输出的数据结果中提取相位信息代入公式(6), 得到液面波动时量化模型预测的液面高度变化(
式中:ξ 为液面高度修正系数。
通常在实验室中, 大量仿真数据显示, 在低信噪比(-30 dB)下常规的自适应滤波器会失效, 而自适应线谱增强算法仍然有约10 dB的增益, 并且显现出更好的均衡和干扰抑制效果[6]。在客轮回归靠岸等波动场景下, 大量的海试实验数据分析结果也证明了该算法的可靠性和准确性, 故将与该算法类似的抗干扰成效较好的算法模型作适应性优化处理后, 运用于本系统的钻井现场钻井液波动场景, 有助于抗干扰性的提升。本算法中频域处理可有效分离噪声与信号主分量, 时域修正增强瞬态响应能力, FFT/IFFT降低频域运算复杂度, 适用于实时系统, 在雷达液位监测(液面波动噪声抑制)、语音增强(非平稳噪声消除)等场景中表现优异。通过时频域有效联合优化, 在非平稳噪声环境中较单一域方法(如传统LMS)误差可以降低30%以上。
雷达液位传感器在四川西南油气田钻井现场多口井进行了测试试验。通过与常规的出口超声波液位传感器并测, 验证雷达液位传感器的准确性、稳定性, 包括水蒸气及钻井液液面波动对其监测效果的影响。雷达液位传感器与常规超声波液位传感器并行安装在出口缓冲槽内, 分别布设采集线路, 独立测试, 互不干扰。为保证测试对比的一致性, 在同位置同时进行实时数据记录, 其测试环境参数统计如表1所示, 性能参数里面记录了罐体参数, 根据罐体积和液位高度, 换算高度所对应的体积占罐总体积的百分比。
| 表1 测试环境参数统计 |
根据钻井现场实际情况, 将雷达液位传感器的数据记录周期设为2 s, 保持与综合录井超声波液位传感器一致。在测试试验过程中, 对西南油气田不同钻井公司钻井队承钻的5口井的现场采集数据进行整理、分析, 选取大量连续的、具有代表性的监测数据进行对比, 用大数据分析及数理统计理论方法将现场大量数据进行整理分析后, 得到出口液位传感器性能指标分析统计, 如表2所示, 在测量准确性、稳定性、响应及时性上雷达液位传感器都远远优于超声波液位传感器, 各项关键目标性能指标都有了大幅提升, 测试试验结果对于持续性优化算法模型、升级改造硬件架构有很重要的意义。
| 表2 出口液位传感器性能指标分析统计 |
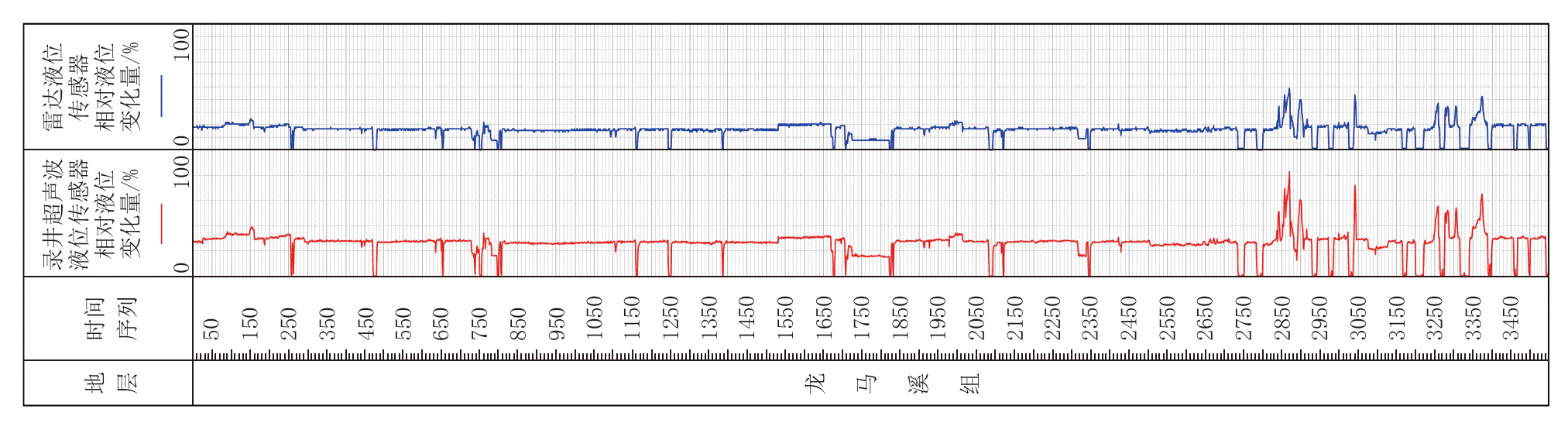
以其中1口具有代表性的井为例, 首先对出口缓冲罐液位监测值变化特征及幅度的准确性进行对比, 数据间隔1 min(图2), 从图中曲线对比分析可知:出口缓冲罐中液位发生升或降的突变点(图中上或下突出的极值点)变化特征基本一致, 录井超声波液位传感器监测值变化的时间点, 雷达液位传感器也发生相同升降趋势变化, 但突变幅度整体略低于超声波液位传感器; 通过对比变化幅度可发现横坐标轴线基础幅度变化范围两者基本吻合, 说明液面长时间稳定在某一水平附近时, 监测值纵向表征的测量误差基本一致。因此雷达液位传感器具备准确性和可靠性, 能及时快速响应缓冲罐内液位变化。
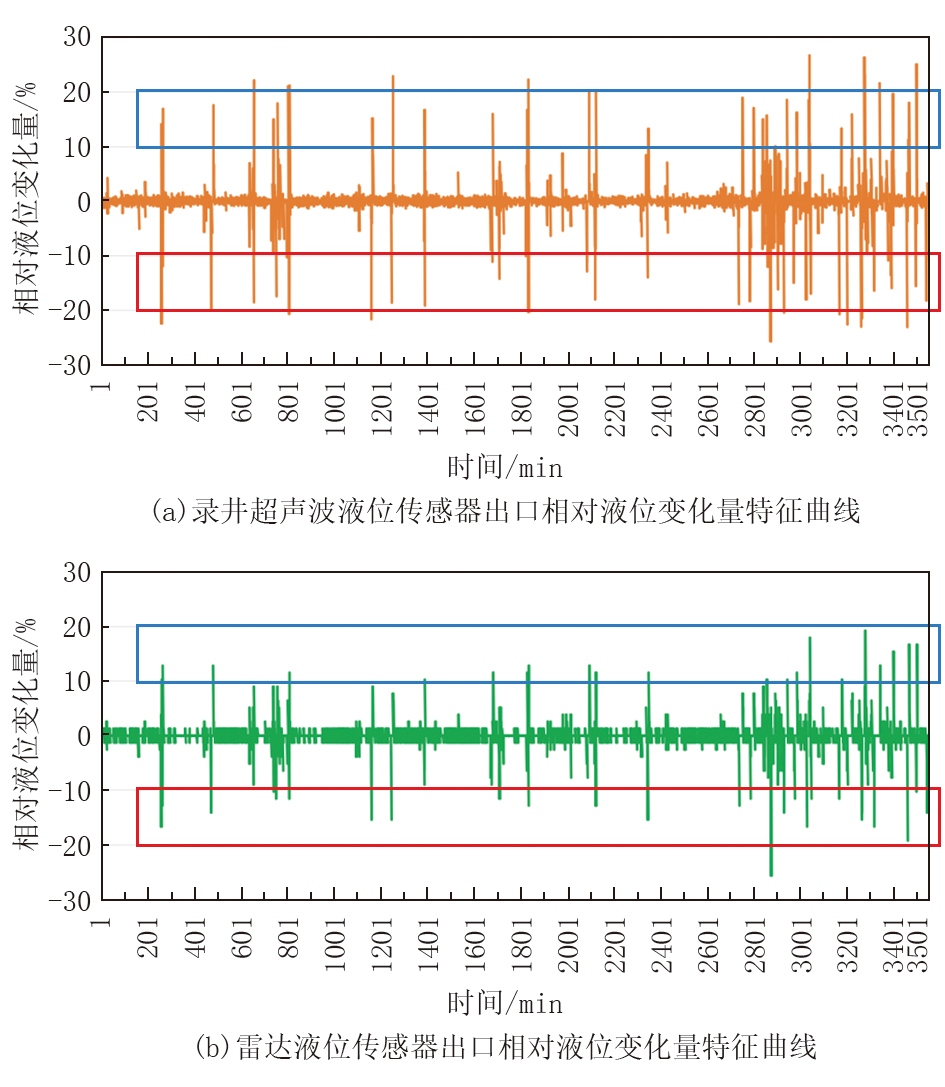 | 图2 出口缓冲罐液位监测值变化特征及幅度对比 |
结合以上升降变化突变点横向幅度变化趋势来看, 超声波液位传感器在同一水平蓝色线框区域附近与雷达液位传感器的不同之处有:630 min处突变点超声波液位传感器明显高于其后2个突变点、1 266 min处突变点明显高于前后2个突变点、2 761 min附近2个突变点明显高于其后至少连续3个突变点、2 991 min处突变点明显低于前后2个突变点、3 221 min处蓝色线框内3个突变点是依次递增的、3 336 min以后的突变点变化趋势也明显不同。如图红色线框区域的后半部分突变点所展现的趋势变化依然有明显差别, 超声波液位传感器不仅跳动大且趋势更乱(图2)。假设超声波液位传感器在液面波动较剧烈时拥有与雷达液位传感器同等的抗干扰性能, 那么两者的突变特征点横向的变化趋势理应保持一致, 而事实与之相悖, 说明其不具备与雷达液位传感器相当的抗干扰性。为了进一步验证雷达液位传感器抗干扰性更强, 在后续的应用中会将其安装位置更靠近钻井液灌入口涌动区域进行对比。
试验过程中偶发的通信异常影响:60 m传输线分布电容达312 pF(理论极限250 pF), 改用RS-485光隔离中继方案降低通信异常频率。电源中断影响:12 V电源纹波> 200 mV时, 触发保护机制, 增加π 型滤波电路解决, 进一步优化数据传输稳定性。
个别井现场缓冲罐钻井液出口位置不同, 尤其是钻井液从上往下灌入槽内形成猛烈的冲击, 造成附近液面激荡涌动幅度较大、钻井液溅射剧烈, 超声波液位传感器监测数据乱跳受到很大的干扰。此种特殊情况下, 可以将雷达液位传感器架高来减小误差, 因其波束窄的特性不会影响其监测性能, 相较于超声波液位传感器可调节自由度更大, 同时可以尽量选择避开涌动最为剧烈之处安装。
结合室内外大量测试数据, 在深度挖掘过程中发现雷达液位传感器具有以下特性:
(1)窄波束特性使罐壁反射干扰降低至-27 dB(超声波液位传感器为-9 dB)。
(2)在水雾浓度> 85%时, 高频穿透能力与雷达性能参数和准确性等保持强相关性。
(3)当前系统在强电磁干扰(> 30 V/m)场景下需增加屏蔽层(现场无电磁干扰), 指的是通过快速温变循环, 模拟实际极端环境中的温度突变场景。
(4)极端温度循环(-45~85 ℃)会导致3.5%的时基漂移(新疆区域温度变化较大)。
在西南油气田W 204HX-X井等多口井连续监测应用时, 为验证雷达液位传感器的长期稳定性, 按照优化改造后的选型与综合录井展开应用对比, 现场出口钻井液从高架槽管中直接灌入缓冲罐内, 根据缓冲罐口空间实际情况, 选择将雷达液位传感器安装在尽量靠近高架槽管距离约50 cm的位置, 此处位于钻井液冲入缓冲罐后液面上涌翻腾区域, 而该井超声波出口流量传感器安装在缓冲罐右侧距离高架槽管1 m左右的液面平稳缓冲区, 此处受钻井液流动冲击造成的波动极小。
随机选取对应时间段的数据进行稳定性对比(图3), 雷达液位传感器(蓝色曲线)基本上反应及时, 可以看出无论是液面升降变化还是曲线上毛刺情况与超声波液位传感器趋势的一致性较好。尽管雷达液位传感器处于波动更剧烈的区域进行监测, 但是从曲线上也未见明显尖锐毛刺或不合理趋势变化, 说明雷达液位传感器在液体剧烈波动场景下的监测效果稳定, 具有较强的抗干扰性, 基本不受液面波动影响, 安装位置选择自由度较高。
 | 图3 W 204HX-X井出口缓冲罐实时液位监测对比 |
测试中途使用高温喷雾装置对两者进行试验, 超声波液位传感器监测值波动较大, 雷达液位传感器无波动。即便是探头表面喷溅有油基钻井液或挂满水珠时也无任何影响, 相反超声波液位传感器则需要及时清理维护才可保持稳定监测, 且有一口井超声波液位传感器受到高温浓雾及钻井液侵蚀而损坏。
雷达液位传感器在极端监测环境下表现出较好的稳定性、准确性和抗干扰性, 大幅减少了现场人员清洁维护液位传感器的工作量, 加速了数智化油田建设中高端智能钻井液液位传感器的国产化替代进程。后续可基于本次应用成果扩展研发数智化油田场景下的分布式多雷达抗干扰[7, 8]协同的3D液位成像系统, 及应用雷达技术集成AI算法进行实时在线井筒液面监测的溢漏预警与可视化监测智能一体化新技术[9], 满足多维智慧油田建设需求。
本次研究和应用结果证实78 GHz调频连续波(FMCW)雷达液位传感器在油气钻探现场出口缓冲罐钻井液液位监测中的技术可行性, 扩展并揭示了高频雷达技术在复杂工业环境中的适用边界, 提出了高端、智能自动化的液位监测过程优化技术解决方案, 无论从成本还是功效上都可以取代超声波液位传感器, 且抗干扰性更强、测量更精确、运行稳定, 为油气钻探过程中钻井液液面智能监测高端装备研发应用提供了新的技术路径和方向。后续研究方向依然是基于智慧油田背景的技术方案研究, 基于本次应用结论深入扩展探索:
(1)开发分布式多雷达抗干扰协同的3D液位成像系统, 对油气田钻探现场钻井液液面进行三维可视化展示, 不仅在缓冲罐, 还要在罐区、井口等所有涉及到钻井液液位监测的区域实现全方位协同三维成像。
(2)在环空液面监测中采用雷达技术集成AI算法, 实现溢漏自动预警和井筒动态化展示, 改变气体噪声干扰的技术现状, 实现高速高频自动化监测、实时智能分析预警和三维可视化技术融合; 探索24 GHz/120 GHz双频段融合测量方案, 实现自动化高频段切换并降低功耗。
(编辑 孔宪青)
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|