

陈勇
中国石油长城钻探工程有限公司录井公司
Chen Yong
中图分类号: TE132.1
文献标识码: A
收稿日期: 2019-04-17
网络出版日期: 2019-06-25
版权声明: 2019 《录井工程》杂志社 《录井工程》杂志社 所有
作者简介:
作者简介 陈勇 工程师,1985年生,2008年毕业于西南石油大学自动化专业,现任中国石油长城钻探工程有限公司泰国录井项目负责人,主要研究方向为智能油井管理系统、图像处理、传感器技术。通信地址:638000 四川省广安市广安区广福街道东阳滨江丽景。电话:13619073070。E-mail:thai_chenyong@163.com
展开
摘要
针对当前油井管理效率低、成本高,管理人员不能实时、准确了解现场生产状况的问题,提出一种基于可视化智能监控、神经网络专家系统的自动分析智能油井管理系统。与传统油井管理系统相比,智能油井管理系统可实现现场生产数据实时传输,数据实时性、真实性提高;通过智能摄像装置对油井生产现场实时监控,油井生产安全性提高;现场生产出现故障时系统通过神经网络专家系统自动识别,智能开关井并通报现场人员及时处理,生产效率提高。智能油井管理系统已安装120余井次,现场应用表明,该系统可全面感知油田生产动态,实现油田的可视化智能监控,预测油气田变化趋势,持续优化油气田管理。
关键词:
Abstract
In view of the inefficiency and high cost of current oil well management,administrators are not able to accurately know the on-site production status in real time,an automatic analysis intelligent oil well management system based on visual intelligent monitoring and neural network expert system is proposed. Compared with traditional oil well management system,intelligent oil well management system can realize real-time transmission of on-site production data,improving the real-time characteristic and authenticity of data. Real-time monitoring of oil well production site through intelligent camera device improves oil well production safety. When the on-site production fails,the system automatically recognizes it through the neural network expert system,intelligently opens and shuts in the well and informs the on-site personnel to dispose in time,improving the production efficiency. The system comprehensively perceives oilfield production performance and realizes visual intelligent monitoring of oilfields. The forecast of the trend of oil and gas fields continuously optimizes oil and gas field management. The intelligent oil well management system has been installed in more than 120 wells,the field application effect is good.
Keywords:
采油厂油井管理主要依靠人工巡回检查,定期保养采油输油设备,人工统计采油数据。由于油井的分布分散、位置偏远,极大地增加了人工劳动强度[1]。在采油设备出现故障时不能及时发现,抽油杆在长时间停止后由于沉砂堆积易导致卡塞,躺井率上升,后期对油井清砂洗井成本较高;产量较低的油井后期由于井内压力不足,井内液位较低,抽油机长时间运行会导致采油效率低,采油电机空转,加重设备磨损、浪费电力资源,严重影响油田效益。在统计采油数据时还存在笔误、数据不准确等问题,导致管理人员无法及时了解现场真实情况,并且不能根据生产所消耗的实际劳动力、电力及原料等数据制定灵活、有效的处理方案[2]。因此,提高采油的自动化、信息化水平至关重要[3]。
当前全国各油田已不同程度地推行油井监控的试点工作,参与的厂商数量比较多,水平参差不齐,各厂家都在做试点工作,也有个别厂家开始规模推广。但暴露出很多问题,主要表现在油井现场监控设备可靠性差,可维护性差,不能承受井场恶劣的工作环境(高温、低温、潮湿和沙尘等);系统智能化程度不高,对现场故障判断准确率低;数据开放性不够,各个厂家系统往往互不兼容,软件数据不能共享,形成信息孤岛。全国十几万口油井,已经采用油井监控的油井数量不超过一万口,不到总数的 10%。
智能油井管理系统在局域网上根据地域特点在每个采油厂设一个实时数据传控中心(包括RTU、实时数据库服务器、视频服务器、客户端),用于集中管理和存放各采油厂所辖区域内生产井现场实时数据,采用Modbus RTU通讯协议做到实时数据库开放的原则。系统总体上分为前端子系统与后端子系统两部分。前端子系统指以部署在井场的RTU为核心的数据采集与传输子系统,后端子系统指以部署在云端的DataServer、WebServer/AppServer以及DBServer为核心的数据存储与分析子系统。
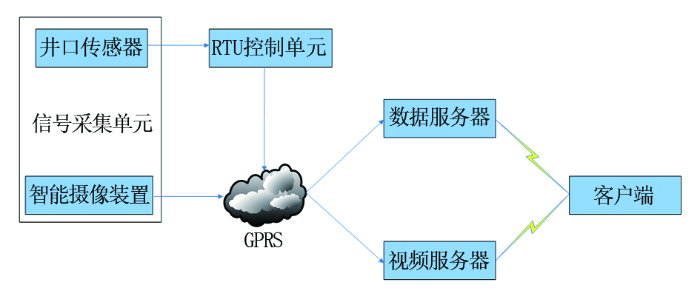
智能油井控制系统由RTU+传感器+智能摄像装置组成。在井口安装示功仪、综合电参仪及流量、压力、温度、电流、脉冲、位移等传感器,以智能摄像机对抽油机工作状态和井下动态进行实时监测,完成数据采集;RTU把采集到的数据通过GPRS实时传输到数据服务器,数据服务器通过智能专家系统对现场工况做出判断,对现场控制系统发出指令,实现遥测遥控无人化操作。智能油井管理系统结构如图1所示。
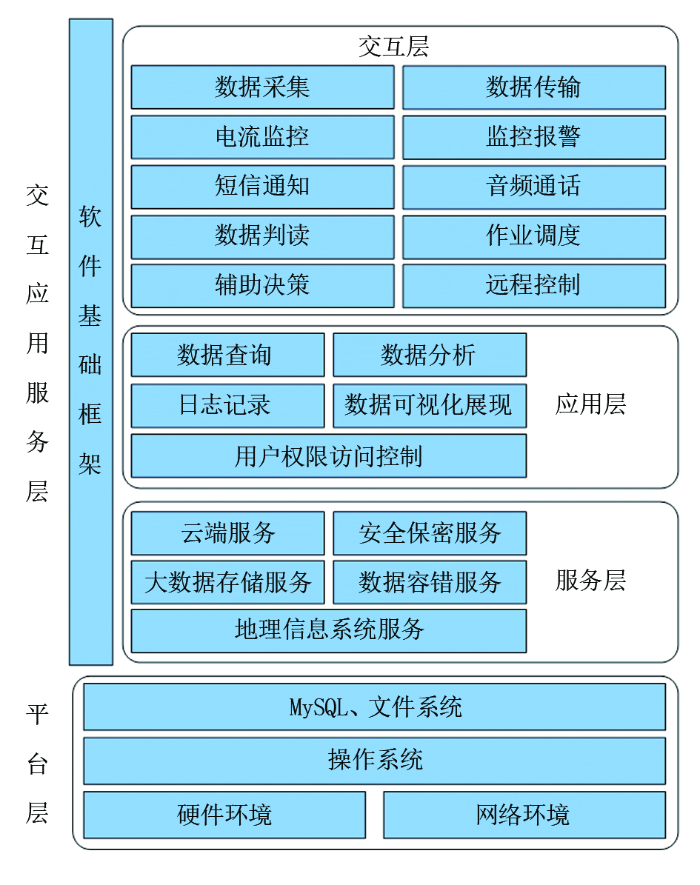
系统采用B/S架构设计,分为平台层与交互应用服务层,如图2所示。平台层提供系统运行所需的软、硬件环境,包括硬件环境、网络环境、操作系统、文件系统及数据库等基础支撑。交互应用服务层实现软件系统的基础框架,又分为服务层、应用层和交互层,服务层为运行在服务端的大数据存储、数据容错分析、安全保密处理以及地理信息系统等服务;应用层为基于共性应用实现的软件功能,包括数据查询、数据分析、日志记录、数据可视化展现以及用户权限访问控制等功能;交互层为提供人机交互的软件功能,包括数据采集、数据传输、电流监控、监控报警、短信通知、音频通话、数据判读、作业调度、辅助决策以及远程控制等软件功能。
智能油井管理系统从功能上划分为信号采集单元、RTU控制单元、数据服务器、视频服务器、客户端计算机,系统硬件构成如图3所示。
信号采集单元主要由井口传感器部分和智能摄像装置构成。井口传感器主要由在线示功仪、综合电参仪及载荷、温度、液位、套压、油压、流量、脉冲、电流传感器组成[4,5,6,7]。智能摄像装置选用高清红外热成像摄像机,实时拍摄油井现场的生产状况,红外热成像高清摄像机采用先进数字电路和图像处理算法可提供细腻平滑的图像。特殊设计的光学连续变焦的红外镜头,兼顾搜索与观察双重应用需求,内置智能分析模块,热点检测算法,可自动探测远距离人员、车辆等热源目标,并辅以重载360°全方位云台,可实现方圆1 km范围内的探测并警告显示[8,9,10]。红外热成像高清摄像机如图4所示。
通过智能红外热成像监控系统,不仅能在白天实时监控井场情况,自动记录井场的每一个可疑图像,并按设定要求进行现场报警和声音警告,还能在漆黑的夜晚、雨雾、飞尘等不可视环境下,清晰看到现场图像,从而更好地保证安全生产[11,12,13,14]。
RTU由带有A/D、D/A变换器的高性能的PIC 16F878A单片机,电源管理,蓄电池供电电路以及无线数据通信部分组成。A/D变换将传感器送来的油井状态模拟信号变成数字信号,再由无线数传电台进行信号处理和调制,以射频信号的形式幅射到空间。电源管理电路用来监测交流电源,一旦交流电源断电,自动转为蓄电池供电;当交流供电恢复正常时,再由交流电源供电并对蓄电池充电,始终保持RTU供电正常。RTU控制器具有16路AI输入,方便接入井口装置各类传感器输入信号,具有RS232、RS485、GPRS/CDMA多种通信模式接口。RTU控制单元如图5所示。
数据服务器、视频服务器、客户端计算机均选用研华高性能工控机IPC-610H。该工控机经过长时间运行,证明其能有效抵抗生产现场冲击波、振荡波,在高温下能长时间稳定运行,散热系统良好,硬件兼容性强,可扩展性能好。
前端子系统中,各RTU通过4G网络或专用无线网络与后端服务器实现实时连接,通过心跳机制确保各RTU始终处于连接状态,RTU与油井现场的各RT终端通过局域网连接实现数据上传与指令下发,RT终端包括在线液面仪、在线示功仪、综合电参仪、井口温压仪以及在线量油仪等设备。井口监视设备通过4G网络或无线网络与视频服务器相连。为了确保数据的安全性,在数据传输前,均进行数据加密。
后端子系统是以部署在云端的DataServer、WebServer/AppServer、DBServer为核心的分布式系统,支持PC端和移动端服务,主要完成数据通信、数据存储与远程控制功能,并提供数据监控、统计、分析等大数据应用服务,同时支持远程数据备份,以保证系统的数据安全。
3.2.1 DataServer
DataServer负责监听并接收前端RTU的连接请求,接收前端RTU发送的数据信息,并将数据发送至云端数据服务器,同时将用户的控制指令发送到井场。DataServer采用分布式部署,以支持上万级的油井数据的并发连接。
3.2.2 WebServer/AppServer
WebServer/AppServer负责提供数据监控与报警、数据统计分析、系统日志分析等大数据应用服务。WebServer/AppServer访问数据库获取系统数据,通过Web/App接口为操作人员、管理人员、运营人员提供数据服务。
3.2.3 DBServer
DBServer负责提供与数据库相关的各种服务,将DataServer接收的RTU数据和用户的控制指令存储至云端的数据库服务器,将视频数据存储至云端的视频服务器,同时提供远程数据备份功能,确保系统的数据安全。
油井管理核心工作是完成对现场油井智能启停管理。由于地面系统通过智能音视频监控,流量压力监测可直观呈现在管理人员面前,而油井井下环境复杂,易出现各种突发事件,故油井管理难点在于井下工况分析与处理。油井井下工作状况主要通过抽油泵示功图体现,分析和解释示功图是直接探究抽油系统工况的一个主要手段,这一过程也被称作故障诊断[4]。传统的方法有人工诊断法、网格法、矢量法、傅里叶位置法、傅里叶曲率法、功率谱密度法。这些方法仅限于分析示功图本身的形状信息,不能较好地描述各图形之间的细微差别,导致诊断正确率不高,特别是对于那些形状相似但故障类别却完全不同的情况未能给予考虑,所以均未达到工程实用化的程度。
采用智能专家系统对示功图数据综合分析,结合大量现场案例,建立油井智能启停数学模型,同时运用计算机神经网络技术,通过计算机深度学习,对现场新发生案例综合分析,实现油井管理的完全智能化[2,6]。
基于大量现场试验数据,对日常遇到的各种井下工况进行总结、归类统计;将各类问题数字化存于综合数据库,该数据库用于存放求解过程中各种当前信息的数据结构,如问题的初始状态、事实或证据、中间推理结论和最后结论等[1]。综合数据库中事先存储油井的实例信息,包括抽汲参数、井况数据、故障代码,根据采油专家知识和示功图特征提取需求,确定了20个相关特征参数,一并存入总数据库,特征参数用C1-C20表示(表1) 。
表1 特征参数释义
| 特征参数 | 释义 | 特征参数 | 释义 | |
|---|---|---|---|---|
| C1 | 实测/理论示功图面积比 | C11 | 最大载荷到最大位移点损失示功图面 积与固定阀关闭点到最大位移点损失 示功图面积比 | |
| C2 | 固定阀、游动阀开闭线载荷差与理论柱 塞载荷差之比 | C12 | 最大位移点到最小载荷点损失示功图 面积与最大位移到游动阀开启点损失 示功图面积比 | |
| C3 | 固定阀开闭载荷、泵上冲程平均载荷差 与理论柱塞载荷差之比 | C13 | 抽吸压力损失比 | |
| C4 | 游动阀开闭载荷、泵下冲程平均载荷差 与理论柱塞载荷差之比 | C14 | 抽吸压力损失比 | |
| C5 | 最大载荷、固定阀开闭载荷差与理论柱 塞载荷差之比 | C15 | 抽油泵泵效 | |
| C6 | 最大位移点与最大载荷点柱塞位移量 与柱塞冲程比 | C16 | 相邻两点载荷跳变点数 | |
| C7 | 游动阀开闭载荷、最小载荷差与理论柱 塞载荷差之比 | C17 | 最小位移点到固定阀开启点柱塞位移量 与柱塞冲程比 | |
| C8 | 最小位移点与最小载荷点柱塞位移量 与柱塞冲程比 | C18 | 最小位移点到游动阀关闭点柱塞位移量 与柱塞冲程比 | |
| C9 | 冲程损失比 | C19 | 柱塞面积内压力损耗 | |
| C10 | 最大载荷点与最小载荷点柱塞位移量 与柱塞冲程比 | C20 | 最大位移点到游动阀开启点柱塞位移量 与柱塞冲程比 |
选定某种工况的图谱模板,基于某油田100 多口油井的实测数据、采油运行记录以及采油专家经验、有杆抽油系统工作理论, 制定出工况识别规则。根据抽油泵工作时的力学行为, 可将抽油系统井下工况划分为供液不足、井下出砂、抽油杆断脱等18 种典型工况, 每种工况都有相应的示功图图谱。
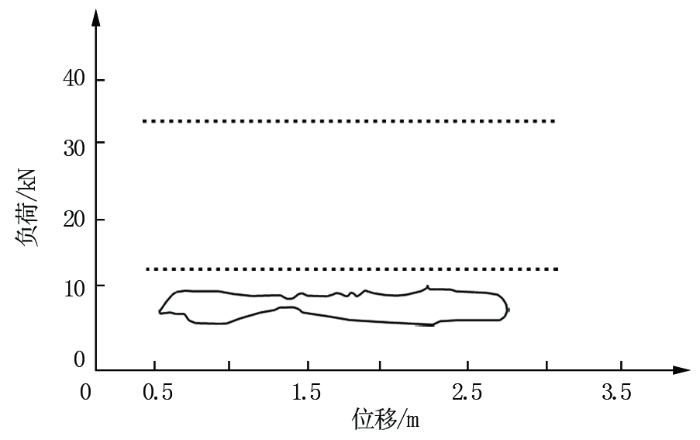
以抽油杆断脱工况为例(其示功图模板见图6),根据对各特征参数结合现场经验分析判断如下:
(1)先将特征参数C1作为对比参数, 液体摩阻工况时C1 >1.2,正常工况时C1>0.6,泵筒弯曲时C1>0.32,各种液击、气体影响、柱塞脱筒、阀漏失、泵上碰、泵下碰时C1>0.35, 而卡泵、砂阻时与C1无关、其余工况时C1<0.35。
(2)再将C2 作为对比参数,液体摩阻工况时C2>1.5, 卡泵工况时C2>2.5, 固定阀卡死、泵严重磨损、抽油杆断脱工况时C2<0.35,而砂阻、连抽带喷时与C2无关, 其余工况时C2 >0.6。
(3)接着将C3 作为对比参数,固定阀卡死时C3>-0.5,泵严重磨损、抽油杆断脱时C3<-0.5,其余工况与C3无关。
同理, 将C4-C20逐一作为对比参数, 观察比较后发现, C15与抽油杆断脱有关, 其余均与该工况没有联系, 于是制定出针对抽油杆断脱工况识别规则, 合计4个必要条件。利用同样的方法可陆续制定出各个典型工况下的识别规则,综合库结构总表见表2。
表2 综合库结构总表
| 规则 | 规则条件 | 规则结论 | 规则 | 规则条件 | 规则结论 | |
|---|---|---|---|---|---|---|
| 1 | C13≥0.8,C15≥0.9 | 连抽带喷 | 10 | C1>0.35,C2>0.6,C18≥0.2 | 固定阀漏失 | |
| 2 | C1≤0.35,C2≤0.35,C3≥-0.5, C4≥0.5,C15≤0.35 | 固定阀卡死 | 11 | C1>0.35,C2>0.6,C17≥0.2 | 游动阀漏失 | |
| 3 | C1≤0.35,C2≤0.35,C3<-0.5, C4≥0.5,C15≤0.35 | 泵严重磨损 | 12 | C1>1.2,2.35>C2>1.5,C9>0.5 | 液体摩阻 | |
| 4 | C1≤0.35,C2≤0.35,C3<-0.5, C15<0.1 | 抽油杆断脱 | 13 | C1>0.32,C2>0.6,C5>0.35, C7>0.35,C10≤0.15,C15>0.35 | 泵筒弯曲 | |
| 5 | C1≤0.35,C2>0.6,C14>1.0, C15≤0.1,C19≥2.5 | 气锁 | 14 | C1>0.32,C2>0.6,C5>0.32, C6<0.13 | 泵上碰 | |
| 6 | C1≥0.35,C2>0.6,C19<2.0, C20≥0.4 | 液击 | 15 | C1>0.32,C2>0.6,C7≥0.32, C8<0.13 | 泵下碰 | |
| 7 | C1≥0.35,C2>0.6,C12>0.44, C19≥2.0 | 气体影响 | 16 | C2≥2.5,C9≤0.5 | 卡泵 | |
| 8 | C1>0.35,C2>0.6,C12>0.44, C19<2.0,C20<0.4 | 轻度液击 | 17 | C1>0.32,1.5≥C2>0.6,C5>0.2, C7<0.2,C9>0.5,C17<0.2, C18<0.2,C19>0.2 | 正常 | |
| 9 | C1>0.35,C2>0.6,C11≥1.5, C12≥1.5 | 柱塞脱筒 | 18 | C16≥9 | 砂阻 |
目前智能油井管理系统在国内某油田已经正式应用,已安装120余井次。因井下故障自动启停抽油机210余次,故障原因分析成功率96.7%;地面阀门损坏,管线破裂漏油发现160余次。通过智能化油井管理系统,1人可以同时管理15口井,按常规现场管理1人负责3口井算,可减少现场维护管理人员32人,按照人均成本10万元/年计,直接创效320万元/年。实时监控井下动态和油井生产环境,实现智能管理现场生产,减少了设备磨损和电力损耗。该智能化油井管理系统的应用,已为油田公司创效超过1 000 万元/年。
智能油井管理系统的应用,解决了传统油井管理系统的数据采集时效性低、准确性差、油井故障判断准确率低,现场管理成本高的问题,实现了油井生产现场的可视化、智能化管理。企业管理人员通过后台管理软件可以实时查看各油井生产动态,了解油区生产情况,为企业管理人员制定下一步措施提供科学依据,极大地提高了企业管理效率。
在当前原油价格较低的情况下,智能油井管理系统有效提高了油井采油时率,增加原油产量,节约人工成本,提高经济效益。随着智能油井管理系统的逐步推广,油田数字化进入一个新的阶段,油田管理进入网络化、智能化,油田生产变得更加安全、高效、环保。
The authors have declared that no competing interests exist.
| [1] |
基于产生式规则系统的抽油泵故障诊断 [J].Fault diagnosis of rod-pumping unit based on production rules system [J]. |
| [2] |
有杆抽油系统故障诊断的人工神经网络方法 [J].Application of BP neural network and self-organizing competitive neural network to fault diagnosis of suck rod pumping system [J]. |
| [3] |
智能化油气田建设关键技术与认识 [J].Key technologies and understandings on the construction of smart fields [J]. |
| [4] |
游梁式抽油机井井下泵功图测试方法 [J].Test approach of downhole pump diagram for beam bumping wells [J]. |
| [5] |
滤波技术在有杆泵抽油系统诊断中的应用 [J].Application of filter technique to diagnosis of sucker-rod pumping system [J]. |
| [6] |
人工神经网络识别抽油机井示功图的研究 [J].Research on identifying the diagram of rod pumping well by artificial neural network [J]. |
| [7] |
基于无线传感网络油田智能监控系统的设计 [J].Design of the WSN-based intelligent monitoring system for oilfield [J]. |
| [8] |
抽油机井集成化智能诊断系统的研究 [J].Integrated intelligent diagnosis system for sucker rod pumped wells [J]. |
| [9] |
一种融合多传感器信息的移动图像识别方法 [J].A novel recognition approach for mobile image fusing inertial sensors [J]. |
| [10] |
深度学习在视频目标跟踪中的应用进展与展望 [J].Advances on application of deep learning for video object tracking [J]. |
| [11] |
基于深度学习的人体行为识别算法综述 [J].A review of human action recognition based on deep learning [J]. |
| [12] |
基于单幅二维图像的摄像机标定方法研究 [J].A camera calibration method study based on single two-dimensional image [J]. |
| [13] |
实时目标跟踪研究 [J].Study on real-time target tracking [J]. |
| [14] |
多遥测图像数据流的自动拼接与自动优选技术 [J].Automatic splicing & optimization method on multiple telemetry image data streams [J]. |

/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}